1. Características técnicas deMotor eVTOL
In eletricidade distribuídaNa propulsão, os motores acionam múltiplas hélices ou ventiladores nas asas ou na fuselagem para formar um sistema de propulsão que fornece impulso à aeronave. A densidade de potência do motor afeta diretamente a capacidade de carga útil da aeronave. A capacidade de potência de saída, a confiabilidade e a adaptabilidade ambiental do motor são fatores importantes para determinar as características dinâmicas e a segurança da aeronave de propulsão elétrica. A seleção de motores para veículos elétricos, drones e eVTOL varia devido a diferentes custos, cenários de aplicação e outros motivos [1].

(Fonte da foto: Site oficial da Network/Safran)
1) Veículos elétricos: ímã mais permanentemotores síncronos,Motores de ímã permanente com maior eficiência e torque podem proporcionar uma melhor experiência de condução. Ao mesmo tempo, a alta densidade de potência desses motores também permite que veículos elétricos obtenham maior potência com o mesmo volume.
(2) UAV: comumente usado sem escovasMotor CC.O motor CC sem escovas possui baixo peso e ruído, além de baixo custo de manutenção, sendo adequado para os requisitos de voo de drones; em segundo lugar, a velocidade do motor CC sem escovas é maior, o que o torna adequado para as necessidades de voo em alta velocidade de drones. Por exemplo, a DJI utiliza motores sem escovas.
(3) eVTOL: Requisitos mais elevados para eficiência do motor e densidade de torque, o motor síncrono de ímã permanente é uma solução muito promissora para o sistema de energia de propulsão elétrica, porque o motor de ímã permanente de fluxo axial tem uma alta taxa de utilização do espaço radial e a densidade de potência e a densidade de torque têm vantagens no caso de pequena relação comprimento-diâmetro. As aeronaves VTOL elétricas atuais, como Joby S4 e Archer Midnight, adotam motores síncronos de ímã permanente [1].
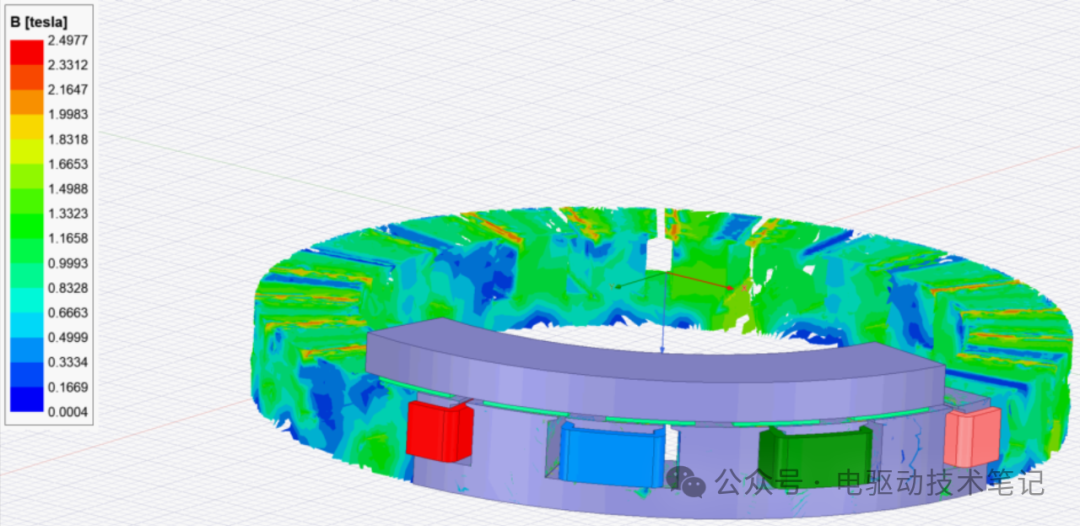
A figura a seguir mostra a imagem da nuvem de intensidade de indução magnética do rotor fixo de um motor de fluxo axial de rotor único e estator único.
A figura a seguir compara os parâmetros dos motores de aeronaves elétricas e de veículos elétricos.

2. Tendência de desenvolvimento de motores para eVTOL
Atualmente, a principal tendência de desenvolvimento do sistema de propulsão de eVTOL é a redução do peso da estrutura do motor e do peso auxiliar do sistema de refrigeração, por meio do aprimoramento das tecnologias de projeto eletromagnético, gerenciamento térmico e redução de peso, além da melhoria contínua da densidade de potência do motor e da capacidade de geração de energia em uma ampla gama de condições variáveis. De acordo com o relatório “Pesquisa e Desenvolvimento de Veículos Voadores e Tecnologias-Chave”, os motores de propulsão aeronáutica já conseguiram atingir densidades de potência nominais superiores a 5 kW/kg, graças ao uso de materiais isolantes com limites de temperatura mais elevados, materiais de ímãs permanentes com maior densidade de energia magnética e materiais estruturais mais leves. Com o aprimoramento do projeto da estrutura eletromagnética do motor, como o uso de matrizes magnéticas Halbach, estruturas sem núcleo de ferro, enrolamento de fio Litz e outras tecnologias, bem como a melhoria do projeto de dissipação de calor, espera-se que a densidade de potência nominal do motor atinja 10 kW/kg em 2030 e ultrapasse 13 kW/kg em 2035 [1].

3. Comparação de rotas puramente elétricas e híbridas
Comparando com a rota puramente elétrica e a rota híbrida, a partir da seleção atual de fabricantes relevantes, o projeto doméstico de eVTOL baseia-se principalmente no esquema puramente elétrico, limitado pela densidade de energia das baterias de íon-lítio, e o eVTOL com baixa capacidade de passageiros é o cenário ideal para pousos com tecnologia de propulsão puramente elétrica. No exterior, alguns fabricantes já definiram o plano híbrido antecipadamente e lideraram diversas rodadas de testes e iterações. Como pode ser visto na tabela a seguir, o esquema híbrido é claramente mais robusto em termos de autonomia e pode alcançar mais aplicações em cenários de tráfego de média e longa distância e baixa altitude no futuro [1].
Data da publicação: 27/02/2025